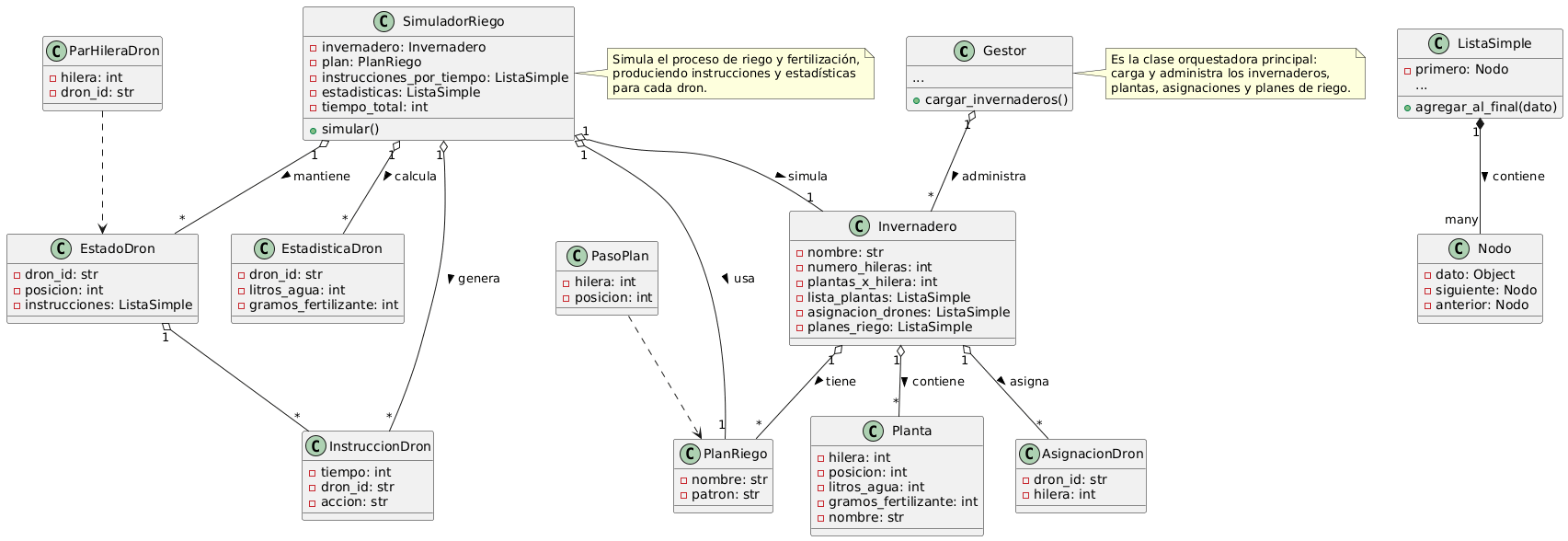
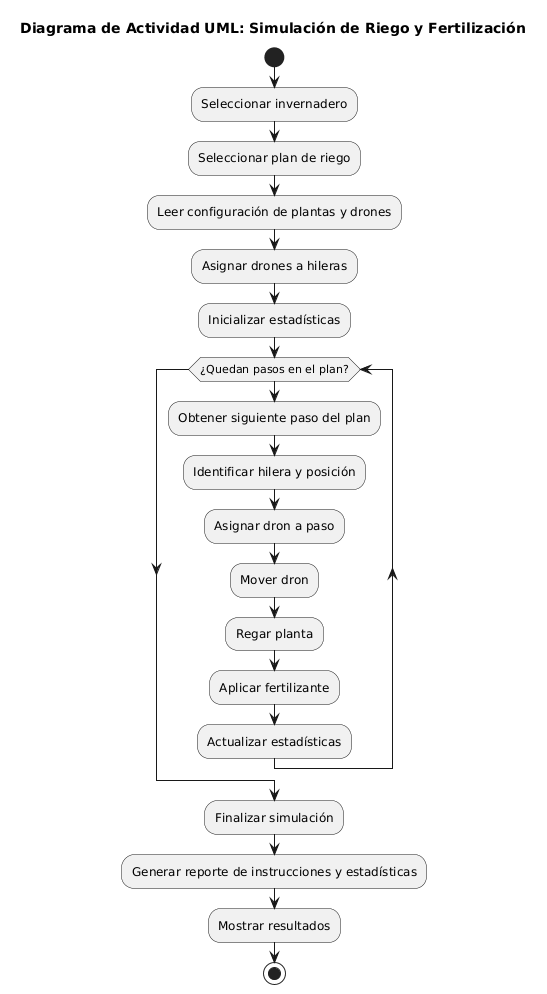
GuateRiegos 2.0 es una aplicación web desarrollada en Python y el framework Flask. Simula el proceso automatizado de riego y fertilización en invernaderos, permitiendo la carga de configuraciones XML, selección de planes, ejecución de simulaciones y generación de reportes HTML/XML.
<h2class="mb-3"style="color:#800000;">Reporte de Simulación</h2> <h4>Invernadero: {{ invernadero.nombre }}</h4> <tableclass="table table-bordered"> <thead> <tr> <th>ID Dron</th> <th>Litros de Agua</th> <th>Gramos de Fertilizante</th> </tr> </thead> <tbody> {% for estadistica in estadisticas %} <tr> <td>{{ estadistica.dron_id }}</td> <td>{{ estadistica.litros_agua }}</td> <td>{{ estadistica.gramos_fertilizante }}</td> </tr> {% endfor %} </tbody> </table>
3.4. Graficación de TDAs (graficar_tda.py)
1 2 3 4 5 6 7
from graphviz import Digraph
defgraficar_tda_simulador(simulador, tiempo, ruta_salida='static/grafo_tda.png'): dot = Digraph(comment='Estado de los TDAs en tiempo t', format='png') dot.attr(rankdir='LR') # Añade nodos y aristas por drone/instrucción dot.render(ruta_salida, format='png', cleanup=True)
3.5. Listas Simples y Dobles (Estructuras/ListaSimple.py)
1 2 3 4 5 6 7 8 9 10
classListaSimple: defagregar_al_final(self, dato): nuevo_nodo = Nodo(dato) ifnotself.primero: self.primero = nuevo_nodo else: actual = self.primero while actual.siguiente: actual = actual.siguiente actual.siguiente = nuevo_nodo
Todo el código fuente compartido en este blog se encuentra bajo la licencia MIT. Puedes usar, modificar y distribuir el código para cualquier propósito, siempre y cuando incluyas la nota de copyright y la licencia original.